Магнитный инкрементальный энкодер OPKON MRI
") Муфта и кронштейн в комплекте (для ∅50 мм)
Муфта и кронштейн в комплекте (для ∅50 мм)
 Защита от пыли и брызг воды
Защита от пыли и брызг воды
 Устойчивость к механическим воздействиям
Устойчивость к механическим воздействиям
 Рабочая температура -20…+80 °C
Рабочая температура -20…+80 °C
 Разрешение 4…512 имп/об
Разрешение 4…512 имп/об
Документация и ПО
| Наименование | Тип документа | Тип файла |
|---|---|---|
| Паспорт OPKON | Паспорт | |
| ТО к MRI40 (ENG) | Техническое описание | |
| ТО к MRI40 (RUS) | Техническое описание | |
| ТО к MRI50 (ENG) | Техническое описание | |
| ТО к MRI50 (RUS) | Техническое описание | |
| Энкодеры и датчики перемещения OPKON | Каталог | |
| 3D модель MRI 40AR6 | CAD библиотека | zip |
| 3D модель MRI 50AR6 | CAD библиотека | zip |
| Отказное письмо (OPKON PRI, MRI) | Письмо |
| Наименование | Цена с НДС |
|---|---|
|
MRI 50AR6 HLD 500 Z V2 2M5R SL Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 500имп/об, выход ABZ, Uпит. =8...24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6x6 и кронштейн в комплекте)

8288
В наличии
Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 500имп/об, выход ABZ, Uпит. =8...24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6x6 и кронштейн в комплекте)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
|
MRI 50AR6 HLD 200 Z V2 2M5R SL Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 200имп/об, выход ABZ, Uпит. =8...24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6x6 и кронштейн в комплекте)

8288
В наличии
Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 200имп/об, выход ABZ, Uпит. =8...24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6x6 и кронштейн в комплекте)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
|
MRI 50AR6 HLD 100 Z V2 2M5R SL Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 100имп/об, выход ABZ, Uпит. =8...24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6x6 и кронштейн в комплекте)
8288
В наличии
Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 100имп/об, выход ABZ, Uпит. =8...24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6x6 и кронштейн в комплекте)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
|
MRI 40AR6 HLD 200 Z V2 2M5R SL Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=40мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 200имп/об, выход ABZ, Uпит. =8...24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6x6 в комплекте)

7943
В наличии
Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=40мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 200имп/об, выход ABZ, Uпит. =8...24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6x6 в комплекте)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
|
MRI 40AR6 HLD 100 Z V2 2M5R SL Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=40мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 100имп/об, выход ABZ, Uпит. =8...24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6x6 в комплекте)
7943
В наличии
Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=40мм, Dвала=6мм, выходной сигнал Push-pull/Line driver(HTL), разрешение 100имп/об, выход ABZ, Uпит. =8...24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6x6 в комплекте)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
|
MRI 50AR8 LD 500 Z V1 2M5R SL Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=50мм, Dвала=8мм, выходной сигнал Line driver(TTL), разрешение 500имп/об, выход ABZ, Uпит. =5В, IP54, кабель 2,5 метра, угловой ввод, муфта 8x8 и кронштейн в комплекте)

8288
В наличии
Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=50мм, Dвала=8мм, выходной сигнал Line driver(TTL), разрешение 500имп/об, выход ABZ, Uпит. =5В, IP54, кабель 2,5 метра, угловой ввод, муфта 8x8 и кронштейн в комплекте)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
Описание инкрементальных магнитных энкодеров серии MRI
Инкрементальные энкодеры (датчики угла поворота, преобразователи угловых перемещений) предназначены для преобразования угла поворота или угловой скорости в импульсы. При одном обороте вала энкодер выдает фиксированное количество импульсов. Это количество импульсов — разрешение (количество импульсов на оборот), величина характеризующая точность энкодера.
Для удобства работы импульсы могут быть преобразованы в физическую величину: расстояние (количество оборотов, угол поворота) или в скорость (частоту вращения). Для этого применяют вторичные устройства, обрабатывающие сигнал: счетчики импульсов, тахометры и ПЛК.
Серия энкодеров MRI — это магнитные энкодеры в линейке инкрементальных энкодеров OPKON для оборудования, которое подвержено воздействию вибраций и механическим нагрузкам. Имеют разрешающую способность от 4 до 512 импульсов на оборот, производятся в корпусах диаметром 40 или 50 мм.
Применение магнитного сенсора в энкодерах OPKON серии MRI делает их устойчивыми к механическим воздействиям, резким перепадам температуры (к образованию конденсата) и к условиям повышенной запыленности. Энкодеры MRI имеют защиту корпуса по классу IP54 (IP65 опционально).
Совместно с магнитными энкодерами серии MRI широко используются аксессуары OPKON, а также энкодеры других серий:
- Муфты соединительные
Предназначены для соединения вала энкодера с механизмом, позволяют компенсировать несоосность. - Энкодеры OPKON PRI 50H с полым валом
Предназначены для установки на вал механизма, занимают минимум пространства. - Серия оптических энкодеров PRI
Универсальные энкодеры с высоким разрешением до 5000 имп/об. - Серия OPKON MRV с аналоговым выходом
Для задач, в которых нужно непрерывно контролировать положение объекта.
Особенности инкрементальных магнитных энкодеров OPKON MRI
- Разрешение датчиков: 4, 8, 16, 25, 32, 40, 50, 64, 80, 100, 125, 128, 160, 200, 250, 256, 400, 500, 512 имп/об
- Типы выходов: Push-Pull, TTL, HTL
- Рабочая температура: -20…+80 °C
- Диаметр корпуса: 40, 50, 58 мм
- Модификации с угловым и осевым кабельным вводом
- Устойчивость к ударам и вибрациям
Принцип действия инкрементальных магнитных энкодеров OPKON MRI
Инкрементальный энкодер — это устройство, преобразующее угловое перемещение вала в нормированный дискретный сигнал. Конструктивно энкодер состоит из измерительного преобразователя, защищенного корпусом и вала, передающего вращательное движение. Для защиты от внешних воздействий измерительной части предусмотрены уплотнения корпуса и вала, обеспечивающие защиту от внешних воздействий IP54. Со стороны вала расположен фланец с резьбовыми отверстиями (М3) для крепления энкодера.

Принцип действия энкодеров OPKON MRI основан на эффекте Холла: под действием внешнего магнитного поля в проводнике с постоянным током возникает холловское напряжение (поперечная разность потенциалов). В энкодерах OPKON серии MRI роль источника магнитного поля выполняет постоянный магнит, установленный на валу энкодера. А измерение напряжения осуществляется с помощью интегральной микросхемы со встроенным датчиком магнитного поля.
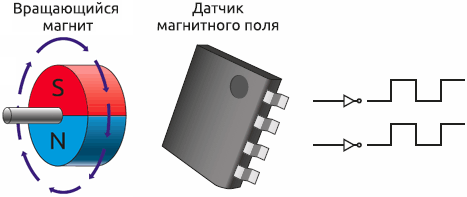
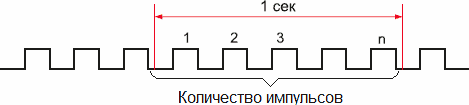
При повороте вала формируется выходной сигнал энкодера. Данный сигнал представляет собой последовательность импульсов, количество которых пропорционально углу поворота. В характеристиках энкодеров эта величина обозначается как разрешение — количество импульсов, поступающих за один оборот (имп/об, PPR, pulse per revolution). С помощью него можно определить дискретность энкодера — перемещение, соответствующее одному импульсу энкодера.
Например, если использовать энкодеры с разрешением 100, 360 и 5000 имп/об, то один импульс будет соответствовать перемещению на 3.6°, 1°, 0.072° соответственно.
Зная разрешение энкодера и считая количество импульсов (контроллером или счетчиком) можно определить:
- Угол поворота (φ).
Подсчет количества импульсов (n), поступивших от энкодера, позволяет определить угол поворота (φ), совершенный валом.Пример: если энкодер выдал 1250 импульсов, а сам он имеет разрешение 5000 имп/об, то это означает, что вал совершил поворот на 90° (1250 * 360 / 5000 = 90).![Пройденное расстояния (обороты)]()
- Угловую скорость (ω).
Для определения скорости вращения (об/мин) необходимо подсчитывать количество импульсов, поступающих за единицу времени (например, за 1 секунду).Пример: если за 1 секунду поступило 1250 импульсов и энкодер также имеет разрешение 5000 имп/об, то скорость вращения вала — 15 оборотов в минуту (1250 * 60 / 5000 = 15).![Угловая скорость]()

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
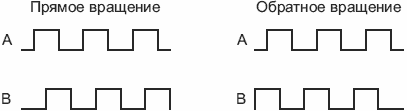
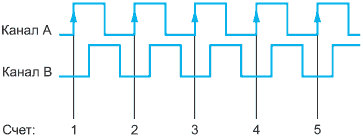
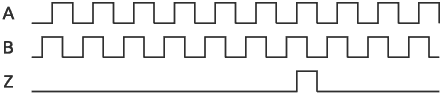
Представленные примеры справедливы для механизмов одностороннего действия. Измерение вращения в двух направлениях невозможно, так как один импульсный сигнал не может дать информацию о том, в какой момент произошла смена направления. Для защиты выходного сигнала от дребезга и определения направления вращения используются два сигнала, сдвинутые относительно друг друга на 90°.
Смещение сигналов обеспечивает возможность определения направления в пределах одного импульса. При вращении в прямом направление сигнал А всегда будет опережать сигнал В, а при вращении в обратном — наоборот, первым будет сигнал В.
Помимо сигналов А и В в энкодерах дополнительно используется сигнал Z. Он выдает единичный импульс, при прохождении кодирующим диском полного оборота (360°). Сигнал Z позволяет подсчитывать количество оборотов. Таким образом, каждый энкодер оборудован тремя каналами (ABZ) для передачи сигнала.
Разрешение энкодера
Разрешение — это основной параметр энкодера, характеризующий его точность. На первый взгляд может показаться, что лучшим выбором является энкодер с максимальным разрешением. Но они имеют более высокую стоимость и к тому же могут быть не совместимы (по частоте сигнала) с вторичным прибором. Частота сигнала (вторичного прибора) накладывает ограничение на максимальное разрешение и максимальную скорость вращения энкодера.
Например: для ПЛК с максимальной частотой на входе 10 кГц, нужно выбрать энкодер, обеспечивающий дискретность в 1° при максимальной скорости вращения 3000 об/мин.
- Если выбрать энкодер в соответствии с требуемой точностью, то необходима модель 360 имп/об. Но максимальная скорость не должна превышать 1667 об/мин.
- Если выбирать энкодер, соответствующий по скорости вращения, то это модель 200 имп/об. Но при таком разрешении обеспечивается точность 1.8°.
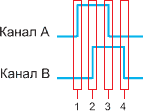
200 имп/об — это номинальное разрешение энкодера, но при использовании специальных алгоритмов счета его можно увеличить в 2 и в 4 раза. Для этого при счете учитываются сигнал не только канала А, но и канала В. При счете по двум каналам, для каждого импульса можно выделить четыре промежуточных состояния:
- Сигнал А = лог. «1», Сигнал В = лог. «0»
- Сигнал А = лог. «1», Сигнал В = лог. «1»
- Сигнал А = лог. «0», Сигнал В = лог. «1»
- Сигнал А = лог. «0», Сигнал В = лог. «0»
Существует три основных режима счета.
- X1
Счет импульсов производится только по переднему фронту одного сигнала. Количество импульсов, выдаваемых на один оборот соответствует номинальному разрешению энкодера.
Пример: с помощью энкодеров с разрешением 100, 200 и 1000 имп/об возможно отслеживание перемещения с точностью 3.6°, 1.8°, 0.36° соответственно.
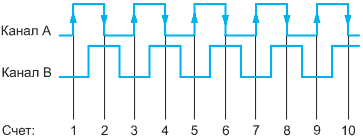
- X2
При счете импульсов учитываются и передний и задний фронты. Таким образом стандартный шаг разбивается пополам, а разрешение увеличивается вдвое.
Пример: с помощью энкодеров с разрешением 100, 200 и 1000 имп/об возможно отслеживание перемещения с точностью 1.8°, 0.9°, 0.18° соответственно.
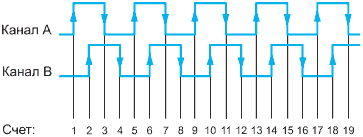
- X4
Для достижения максимальной разрешающей способности счет осуществляется по переднему и заднему фронтам обоих сигналов. Используя такой метод счета разрешение увеличивается в 4 раза.
Пример: с помощью энкодеров с разрешением 100, 200 и 1000 имп/об возможно отслеживание перемещения с точностью 0.9°, 0.45°, 0.09° соответственно.
Типы выходных сигналов
Для передачи сигнала энкодеры могут быть оборудованы тремя типами выходов:
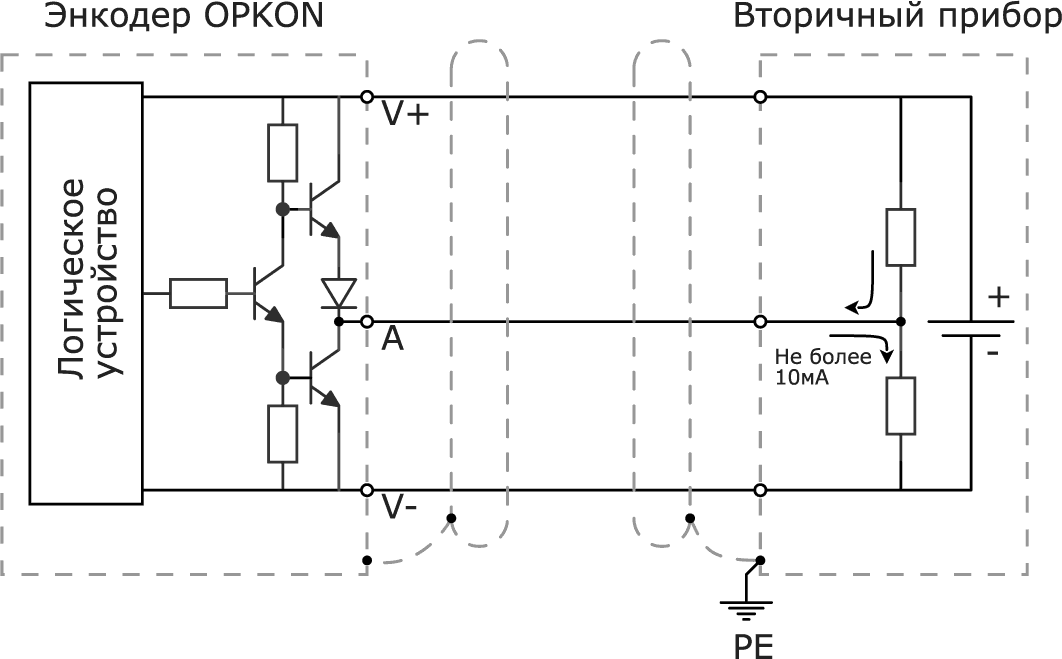
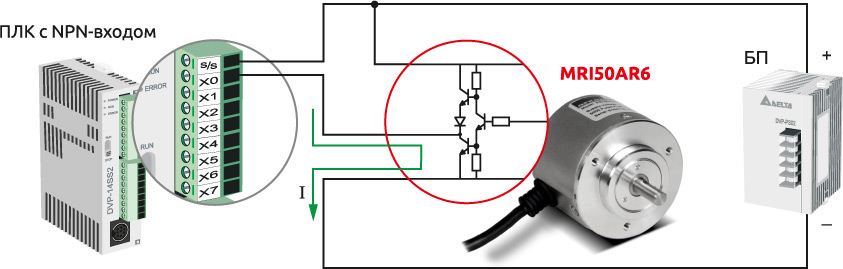
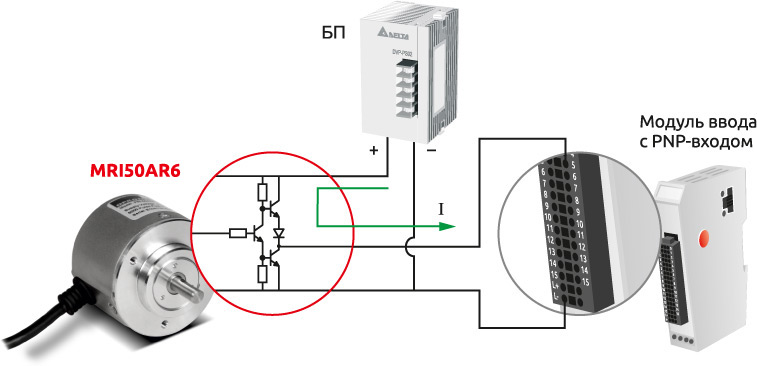
- Транзисторный выход Push-Pull
Для передачи сигнала используется три канала A, B и Z. Каждый из них может быть включен по схеме NPN и PNP.
Уровень сигнала (лог. «1» или «0» ) определяется относительно питающего напряжения. На рисунке справа представлена условная схема подключения.
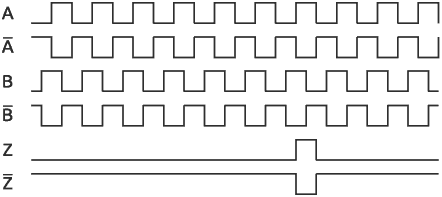
- Дифференциальный выход LineDriver TTL
Для передачи сигнала используется три пары сигналов AA, BB, ZZ.
Каждая пара передает дифференциальный сигнал. Уровень сигнала — 5 В. Дифференциальная передача необходима при наличии внешних источников ЭМ-помех или при большой длине сигнального кабеля.
- Дифференциальный выход LineDriver HTL
Данный тип выхода аналогичен модификации LineDriver TTL. Но у модификации HTL уровень сигнала не фиксированный (5 В), а может изменяться в диапазоне от 8 до 24 В. Уровень сигнала соответствует питающему напряжению (см. рисунок справа).
Модификация LineDriver HTL может использоваться, и как обычный энкодер с Push-Pull-выходом.

Универсальные выходы LineDriver
Каждый из выходных сигналов (A, А, B, B, Z, Z) энкодеров OPKON MRI (модификации HTL) является универсальным (реализован по схеме Push-Pull) работает с NPN, и PNP-входами. Это дает возможность использовать энкодеры с выходом LineDriver для передачи сигнала по стандартной дифференциальной схеме и по однопроводной схеме (без инвертированных сигналов).
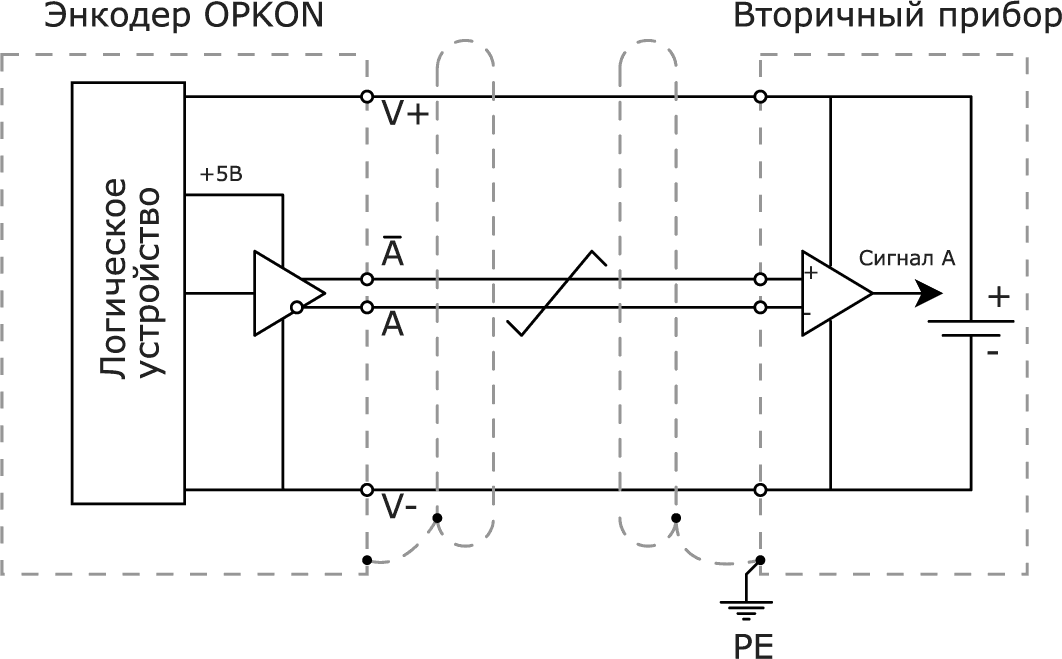
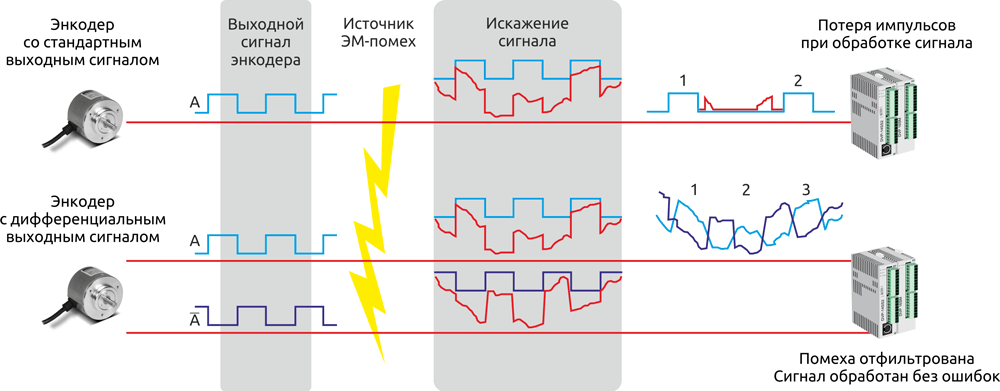
Помехозащищенность дифференциального выходного сигнала
При использовании энкодеров со стандартным выходом (ABZ) возможно возникновение ложных срабатываний. Это может происходить из-за большой длины сигнального кабеля, стороннего оборудования (излучение ЭМ-помех) или при несоблюдение правил монтажа. Для работы в таких условиях рекомендуется использовать энкодеры с дифференциальным выходом (A, A,B, B, Z, Z).
Помехозащищенность дифференциального сигнала выше, т.к. вторичное устройство (счетчик) отслеживает разницу между двумя сигналами (A и A), а не между одиночным сигналом и уровнем питающего напряжения (А и Vобщ.). Таким образом, помехи одинаково влияющие на два проводника (A и A) при дальнейшей обработке сигнала (дифференциальным усилителем вторичного устройства) фильтруются и не вносят ошибок в измерения.
Примеры использования магнитных инкрементальных энкодеров MRI
Список применений:
- Контроль скорости и положения на балансировочном станке
- Поддержание скорости размотки на печатной машине
- Линия поперечной резки полипропиленовых мешков
Контроль скорости и положения на балансировочном станке
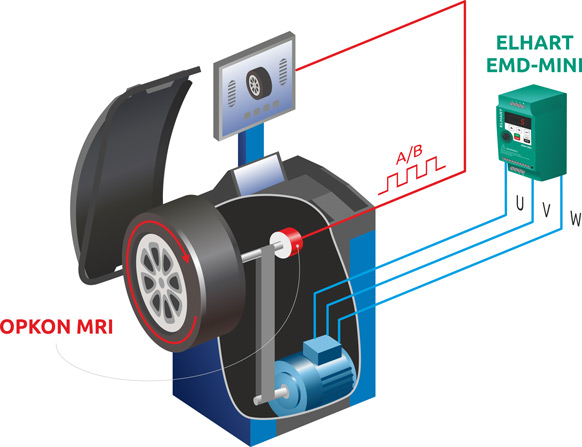
При использовании балансировочных станков могут применяться магнитные энкодеры OPKON MRI 50AR6 HLD 500 Z V2 2M5R SL. Датчик позволяет точно определять угол поворота колеса при балансировке. Благодаря использованию магнитного сенсора энкодер MRI сохраняет работоспособность даже в условиях повышенной загрязненности и перепадов температур. С помощью преобразователя частоты EMD-MINI регулируется скорость вращения объекта.
Поддержание скорости размотки на печатной машине
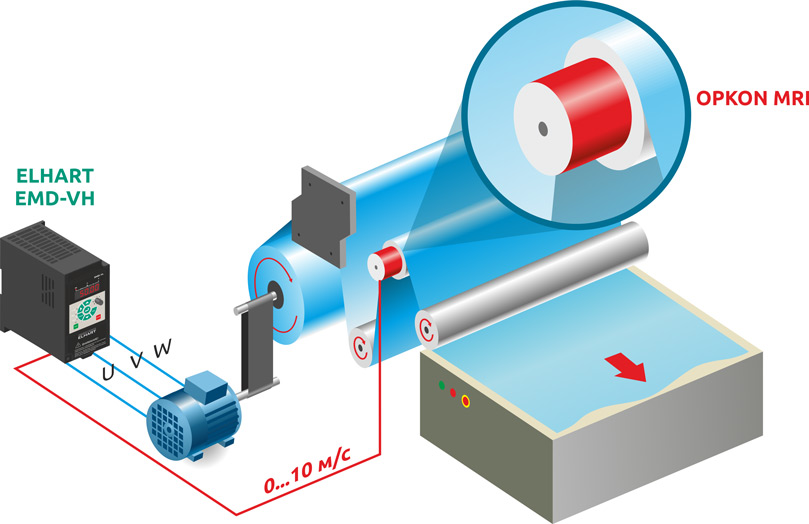
Информация о скорости вращения (от энкодера OPKON MRI 50AR6 HLD 100 Z V2 2M5R SL) передается в преобразователь частоты EMD-VH. При размотке преобразователь частоты автоматически изменяет скорость вращения, поддерживая постоянную линейную скорость. Благодаря поддержанию постоянной линейной скорости обеспечивается защита полотна от растяжения и замятия.
Линия поперечной резки полипропиленовых мешков
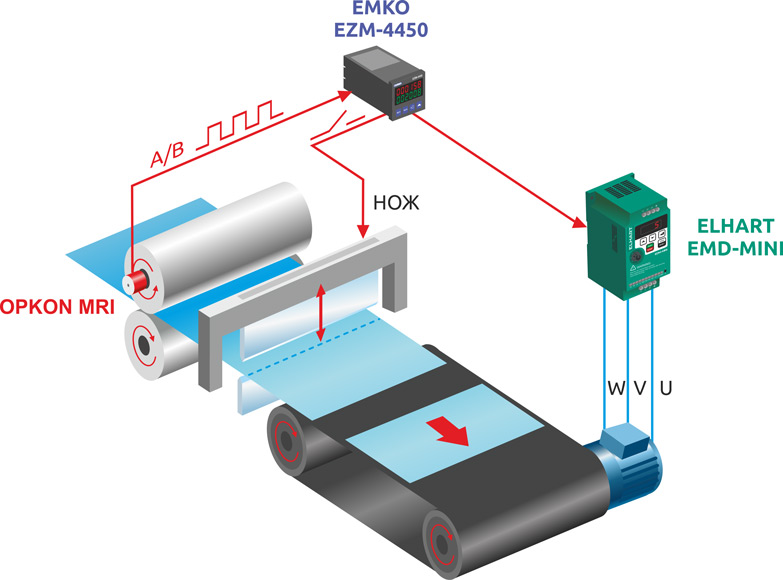
При производстве полипропиленовых мешков необходимо поддерживать точность нарезки заготовок. Длина мешка контролируется с помощью энкодера OPKON MRI 40AR6 HLD 200 Z V2 2M5R SL, установленного на ведущем валу. Информация с энкодера поступает на счетчик в виде инкрементального сигнала. Счётчик импульсов отсчитывает пройденный путь и при достижении заданного размера подает команду для запуска ножа гильотины.
Технические характеристики магнитного инкрементального энкодера OPKON MRI
| Модификация | MRI 40 | MRI 50 | MRI 58 |
|---|---|---|---|
| Диаметр корпуса | 40 мм | 50 мм | 58 мм |
| Разрешение | 4, 8, 16, 25, 32, 40, 50, 64, 80, 100, 125, 128, 160, 200, 250, 256, 400, 500, 512 имп/об |
||
| Выходной сигнал | Push-Pull, TTL, HTL | ||
| Напряжение питания | =5 В, =8…24 В | ||
| Каналы | AB, ABZ | ||
| Максимальная скорость вращения | 3500 об/мин | ||
| Степень защиты | IP54 (тип корпуса А) IP67 (тип корпуса AW) |
||
| Максимальная радиальная нагрузка на вал | 100 Н | 60 Н | |
| Максимальная осевая нагрузка на вал | 60 Н | 40 Н | |
| Рабочая температура | -20…+80 °C | ||
| Температура хранения | -30…+90 °C | ||
| Материал корпуса | алюминий, сталь | ||
| Материал вала | нержавеющая сталь | ||
| Диаметр вала | 4 / 6 / 8 мм | 6 / 8 / 10 мм | |
| Крепление | 3 отверстия М3 | ||
| Наименование составляющих комплекта |
MRI 40AR6 | MRI 50AR6 MRI 50AR8 MRI 50AR10 |
MRI 58AR6 MRI 58AR8 MRI 58AR10 |
|---|---|---|---|
| Г-образный кронштейн | |||
| Муфта |
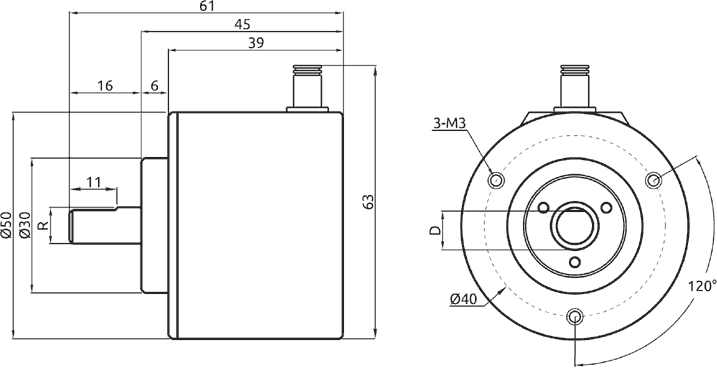
Габаритные размеры магнитного инкрементального энкодера OPKON MRI
Инкрементальный магнитный энкодер OPKON MRI40
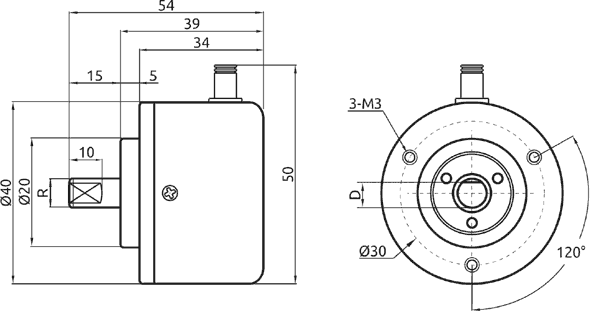
| R | D |
|---|---|
| ∅ 4 мм | 3,3 мм |
| ∅ 6 мм | 5,5 мм |
| ∅ 8 мм | 7,3 мм |
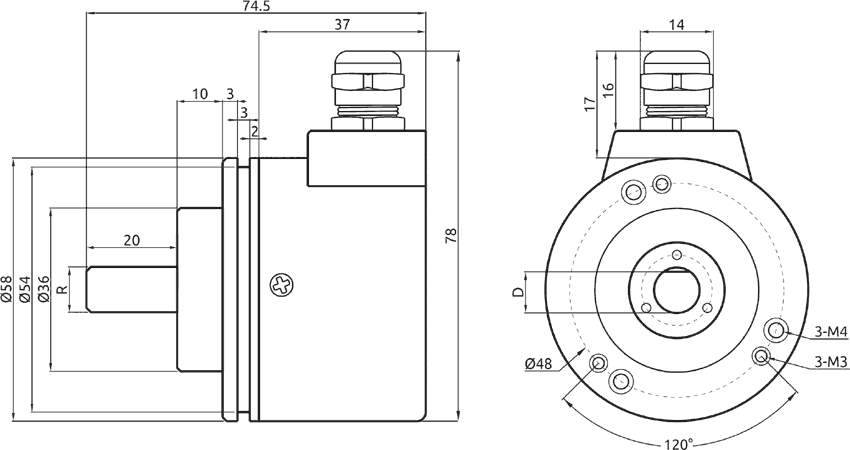
Инкрементальный магнитный энкодер OPKON MRI50
| R | D |
|---|---|
| ∅ 6 мм | 5,5 мм |
| ∅ 8 мм | 7,3 мм |
| ∅ 10 мм | 9 мм |
Инкрементальный магнитный энкодер OPKON MRI58
| R | D |
|---|---|
| ∅ 6 мм | 5 мм |
| ∅ 8 мм | 7 мм |
| ∅ 10 мм | 9 мм |
Схемы подключения магнитных инкрементальных энкодеров OPKON MRI
Подключение энкодеров c выходным сигналом Push-Pull
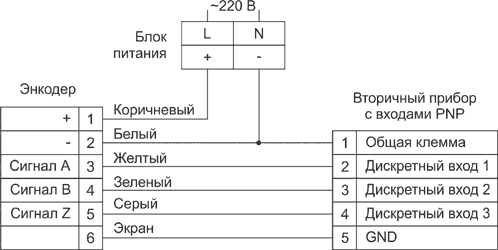
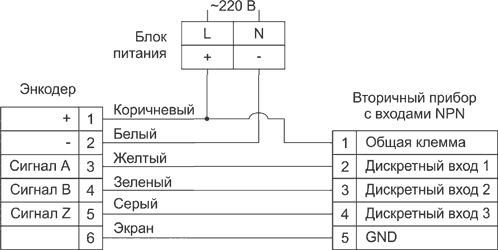
| Контакт | Обозначение | Описание |
|---|---|---|
| Коричневый | V+ | Питание, =5 В, =8…24 В |
| Белый | V- | Питание, 0 В |
| Желтый | A | Выходной сигнал, фаза А |
| Зеленый | B | Выходной сигнал, фаза B |
| Серый | Z | Выходной сигнал, фаза Z |
| Экран | GND | Заземление |
Подключение энкодеров MRI c выходным сигналом LineDriver
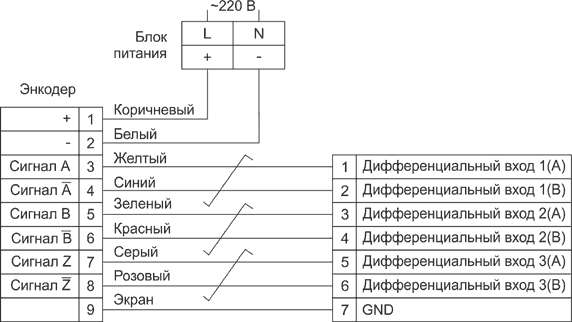
| Контакт | Обозначение | Описание |
|---|---|---|
| Коричневый | V+ | Питание, =5 В, =8…24 В |
| Белый | V- | Питание, 0 В |
| Желтый | A | Выходной сигнал, фаза А |
| Синий | A | Выходной сигнал, фаза A |
| Зеленый | B | Выходной сигнал, фаза B |
| Красный | B | Выходной сигнал, фаза B |
| Серый | Z | Выходной сигнал, фаза Z |
| Розовый | Z | Выходной сигнал, фаза Z |
| Экран | GND | Заземление |
Информация для заказа магнитного инкрементального энкодера OPKON MRI
| MRI | SL | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Диаметр корпуса | ||||||||||
| 40 мм | 40 | |||||||||
| 50 мм | 50 | |||||||||
| 58 мм | 58 | |||||||||
| Тип корпуса | ||||||||||
| Стандартное исполнение | A | |||||||||
| Защищенное исполнение | AW | |||||||||
| Диаметр вала | ||||||||||
| 6 мм | R6 | |||||||||
| 8 мм | R8 | |||||||||
| 10 мм (не доступно для MRI 40) | R10 | |||||||||
| Тип выходного сигнала | ||||||||||
| Push-Pull | LTP | |||||||||
| TTL Linedriver | LD | |||||||||
| HTL Linedriver | HLD | |||||||||
| Разрешение | ||||||||||
| 4, 8, 16, 25, 32, 40, 50, 64, 80, 100, 125, 128, 160, 200, 250, 256, 400, 500, 512 имп/об |
4…512 | |||||||||
| Выходные каналы | ||||||||||
| Каналы A и B | B | |||||||||
| Каналы A, B и Z | Z | |||||||||
| Напряжение питания | ||||||||||
| =5 В | V1 | |||||||||
| =8…24 В | V2 | |||||||||
| Подключение | ||||||||||
| Кабель, 2,5 метра | 2M5 | |||||||||
| Кабель, 5 метров | 5M | |||||||||
| Кабель, 8 метров | 8M | |||||||||
| Кабель, 10 метров | 10M | |||||||||
| Тип ввода кабеля | ||||||||||
| Угловой | R | |||||||||
| Осевой | A | |||||||||
Пример: MRI 50AR6 HLD 500 Z V2 2M5R SL.