Оптический тросовый энкодер OPKON DWE
 Защита от пыли и брызг воды
Защита от пыли и брызг воды
 Быстрый монтаж
Быстрый монтаж
 Рабочая температура -20…+80 °C
Рабочая температура -20…+80 °C
 Рабочий диапазон 500…3600 мм
Рабочий диапазон 500…3600 мм
 Разрешение 0,1 мм/имп
Разрешение 0,1 мм/имп
Документация и ПО
| Наименование | Тип документа | Тип файла |
|---|---|---|
| Паспорт OPKON | Паспорт | |
| Энкодеры и датчики перемещения OPKON | Каталог |
| Наименование | Цена с НДС |
|---|---|
|
DWPM1 500 A I40 2M5R Линейный тросовый потенциометр (Измеряемый диапазон 500мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)

55618
В наличии
Линейный тросовый потенциометр (Измеряемый диапазон 500мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
|
DWPM2 2500 A I40 2M5R Линейный тросовый потенциометр (Измеряемый диапазон 2500мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)
82584
В наличии
Линейный тросовый потенциометр (Измеряемый диапазон 2500мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
|
DWPM1 100 D I4 2M5R Линейный тросовый потенциометр (Измеряемый диапазон 100мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)

52250
В наличии
Линейный тросовый потенциометр (Измеряемый диапазон 100мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
|
DWPM1 700 A I40 2M5R Линейный тросовый потенциометр (Измеряемый диапазон 700мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)

57303
В пути
Линейный тросовый потенциометр (Измеряемый диапазон 700мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
|
DWPM1 1250 A I40 2M5R Линейный тросовый потенциометр (Измеряемый диапазон 1250мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)

58991
В наличии
Линейный тросовый потенциометр (Измеряемый диапазон 1250мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
|
DWPM2 2500 A I40 2M5R Линейный тросовый потенциометр (Измеряемый диапазон 2500мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)

82584
Под заказ
Линейный тросовый потенциометр (Измеряемый диапазон 2500мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
|
DWPM2 3500 A I40 2M5R Линейный тросовый потенциометр (Измеряемый диапазон 3500мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)

106333
В наличии
Линейный тросовый потенциометр (Измеряемый диапазон 3500мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
|
DWPM3 5000 D I4 2M5R Линейный тросовый потенциометр (Измеряемый диапазон 5000мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)

123033
В наличии
Линейный тросовый потенциометр (Измеряемый диапазон 5000мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
|
DWPM1 300 D I4 2M5R Линейный тросовый потенциометр (Измеряемый диапазон 300мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)

53935
В наличии
Линейный тросовый потенциометр (Измеряемый диапазон 300мм, выходной сигнал 4...20мА, IP65, кабель 2,5 метра, угловой ввод)
Датчики перемещения OPKON
OPKON
|
Загрузка… |
Описание оптических тросовых энкодеров серии DWE
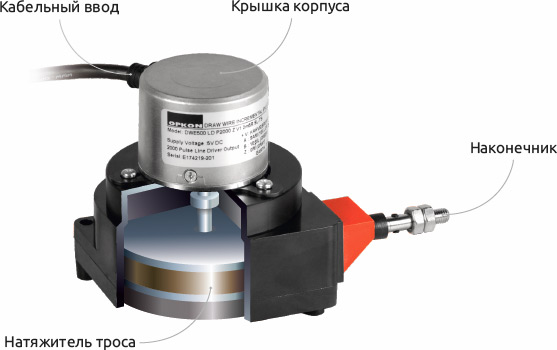
Тросовые энкодеры OPKON серии DWE представляют собой оптический энкодер, присоединенный к тросовому механизму. При вытягивании троса энкодер выдает импульсы, количество которых соответствует пройденному пути троса. Благодаря такой конструкции трос может находится в агрессивных условиях (жидкие среды, избыточное давление, электромагнитные помехи, повышенная загрязненность), а сам энкодер — в безопасной зоне.
Энкодеры DWE предназначены для использования в составе строительной, грузовой и сельскохозяйственной техники.
Особенностью энкодеров DWE является система подачи троса, которая обеспечивает высокую точность и повторяемость. Данная конструкция позволяет измерять линейные перемещения без привязки к телам вращения.
Особенности оптического тросового энкодера OPKON DWE
- Выходные сигналы: Push-Pull, TTL, HTL
- Легкий и быстрый монтаж
- Компактный корпус с защитой IP54
- Кабельный вывод до 10 м
- Оптический энкодер, устойчивый к электромагнитным помехам
- Связь с объектом через гибкий тросс
Принцип действия оптического тросового энкодера OPKON DWE
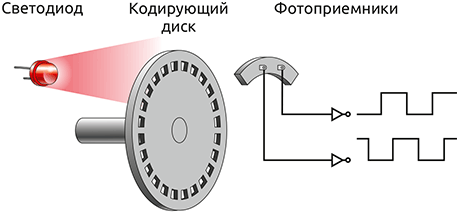
Принцип действия энкодеров OPKON DWE основан на фотоэлектрическом эффекте: при попадании светового потока на фотоприемник, формируется сигнал, соответствующий логической единице, а при его отсутствии — логическому нулю.
Прерывание светового потока осуществляется вращающимся кодирующим диском, установленным перед фотоприемником. Диск крепится к валу энкодера и обеспечивает формирование последовательности импульсов, которая эквивалентна перемещению вала. Вращение вала осуществляется благодаря расположенному в корпусе датчика тросу. Трос наматывается на катушку, соединенную с валом энкодера.
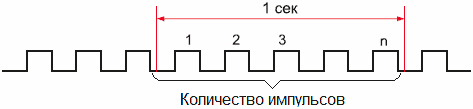
При перемещении энкодера формируется выходной сигнал. Сигнал представляет собой последовательность импульсов, количество которых пропорционально пройденному расстоянию, а частота — скорости движения:
- Пройденное расстояние (S)
Зная разрешение энкодера и общее число импульсов, можно определить общую дистанцию.![Пройденное расстояние (мм)]()
- Скорость движения (V)
Подсчитав количество импульсов, поступивших за промежуток времени можно определить скорость движения.![Скорость движения]()

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
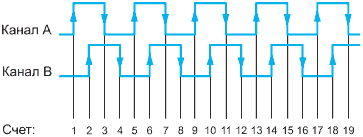
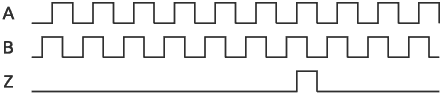
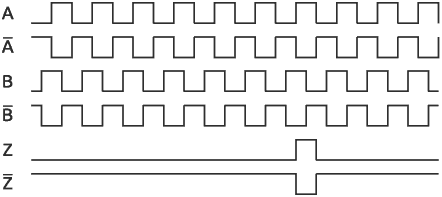
Для защиты выходного сигнала от дребезга и определения направления движения используются два фотоприемника, установленные со смещением относительно друг друга. Таким образом, энкодер выдает два сигнала, которые сдвинуты относительно друг друга на 90°.
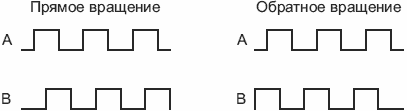
Помимо измерения скорости и пройденного расстояния линейный энкодер позволяет определить направление движения. Для этого у энкодера предусмотрено два выходных сигнала, смещенных друг относительно друга. При вращении в прямом направление сигнал А всегда будет опережать сигнал В, а при вращении в обратном — наоборот, первым будет сигнал В.
Разрешение энкодера
Разрешение — это основной параметр энкодера, характеризующий его точность. На первый взгляд может показаться, что лучшим выбором является энкодер с максимальным разрешением. Но они имеют более высокую стоимость и к тому же могут быть не совместимы (по частоте сигнала) с вторичным прибором. Частота сигнала (вторичного прибора) накладывает ограничение на максимальное разрешение энкодера и максимальную скорость перемещения объекта.
Например: для ПЛК с максимальной частотой на входе 10 кГц, нужно выбрать энкодер, обеспечивающий дискретность в 100 мкм при максимальной скорости 1,5 м/с.
- Если выбрать энкодер в соответствии с требуемой точностью, то необходима модель 0,1 мм/имп. Но максимальная скорость не должна превышать 1 м/с.
- Если выбирать энкодер, соответствующий по скорости, то это модель 0,200 мм/имп. Но при таком разрешении обеспечивается точность 200 мкм.
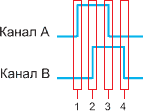
0,2 мм/имп — это номинальное разрешение энкодера, но при использовании специальных алгоритмов счета его можно увеличить в 2 и в 4 раза. Для этого при счете учитываются сигнал не только канала А, но и канала В. При счете по двум каналам, для каждого импульса можно выделить четыре промежуточных состояния:
- Сигнал А = лог. «1», Сигнал В = лог. «0»
- Сигнал А = лог. «1», Сигнал В = лог. «1»
- Сигнал А = лог. «0», Сигнал В = лог. «1»
- Сигнал А = лог. «0», Сигнал В = лог. «0»
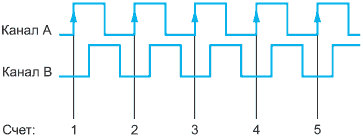
Существует три основных режима счета.
- X1
Счет импульсов производится только по переднему фронту одного сигнала. Количество импульсов, выдаваемых на 1мм пройденного пути соответствует номинальному разрешению энкодера.
Пример: с помощью энкодеров с разрешением 0.1, 0.2 и 0.4 мм/имп возможно отслеживание перемещения с точностью 100 мкм, 200 мкм и 400 мкм соответственно.
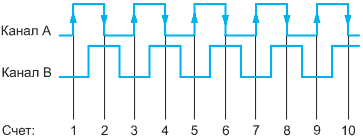
- X2
При счете импульсов учитываются и передний и задний фронты. Таким образом стандартный шаг разбивается пополам, а разрешение увеличивается вдвое.
Пример: с помощью энкодеров с разрешением 0.1, 0.2 и 0.4 мм/имп возможно отслеживание перемещения с точностью 50 мкм, 100 мкм и 200 мкм соответственно.
- X4
Для достижения максимальной разрешающей способности счет осуществляется по переднему и заднему фронтам обоих сигналов. Используя такой метод счета разрешение увеличивается в 4 раза.
Пример: с помощью энкодеров с разрешением 0.1, 0.2 и 0.4 мм/имп возможно отслеживание перемещения с точностью 25 мкм, 50 мкм и 100 мкм соответственно.
Типы выходных сигналов
Для передачи сигнала энкодеры могут быть оборудованы тремя типами выходов:
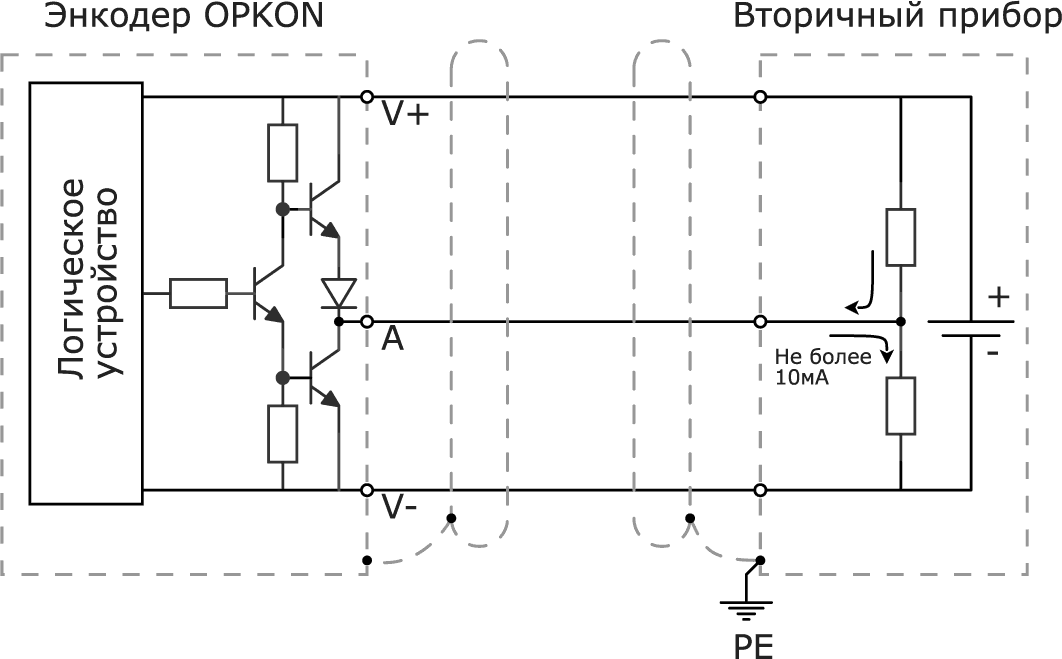
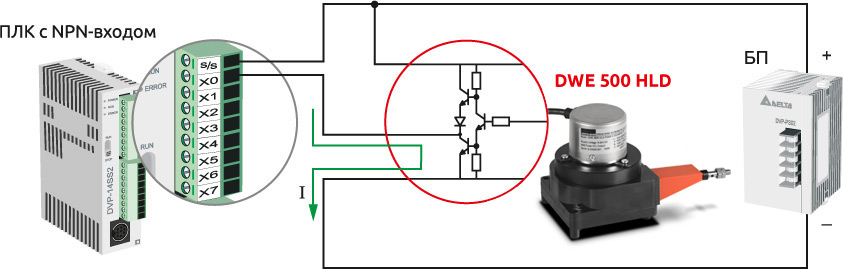
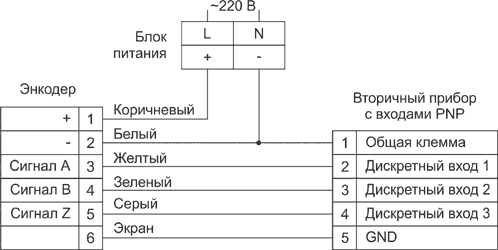
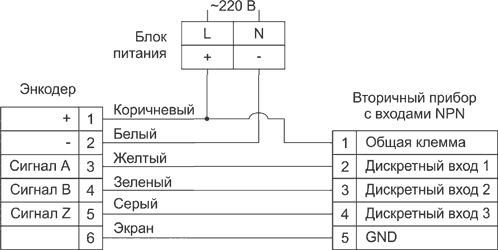
- Транзисторный выход Push-Pull
Для передачи сигнала используется три канала A, B и Z. Каждый из них может быть включен по схеме NPN и PNP.
Уровень сигнала (лог. «1» или «0» ) определяется относительно питающего напряжения. На рисунке справа представлена условная схема подключения.
- Дифференциальный выход LineDriver TTL
Для передачи сигнала используется три пары сигналов AA, BB, ZZ.
Каждая пара передает дифференциальный сигнал. Уровень сигнала — 5 В. Дифференциальная передача необходима при наличии внешних источников ЭМ-помех или при большой длине сигнального кабеля.
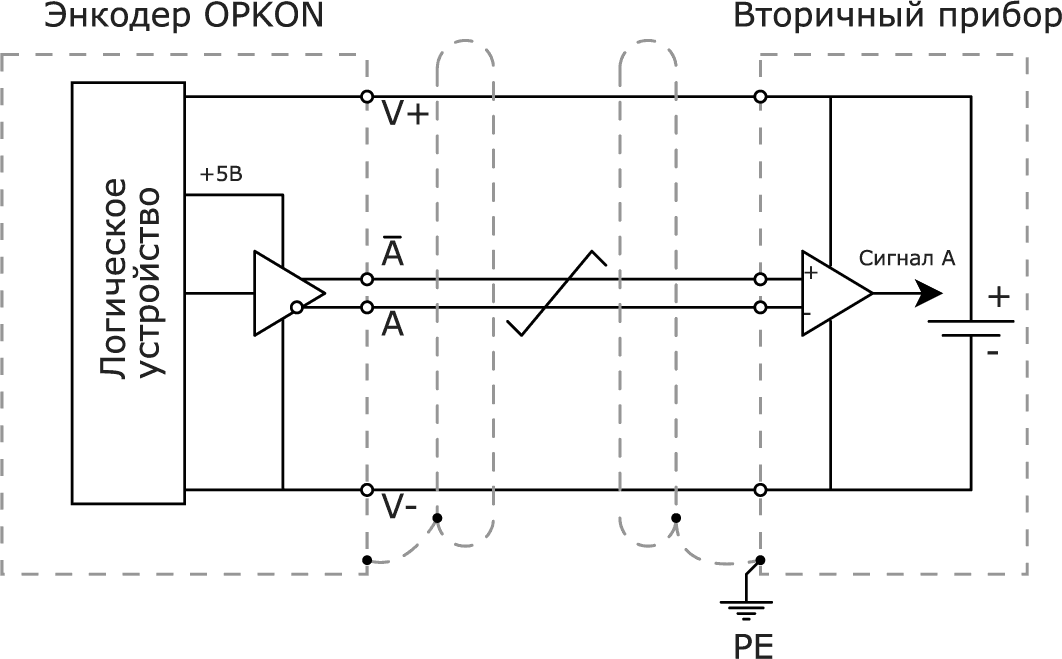
- Дифференциальный выход LineDriver HTL
Данный тип выхода аналогичен модификации LineDriver TTL. Но у модификации HTL уровень сигнала не фиксированный (5 В), а может изменяться в диапазоне от 5 до 24 В. Уровень сигнала соответствует питающему напряжению (см. рисунок справа).
Таким образом, энкодер модификации HTL может выдавать сигнал, соответствующий TTL-логике, для этого достаточно лишь использовать блок питания 5 В. К тому же модификация LineDriver HTL может использоваться, и как обычный энкодер с Push-Pull-выходом.
Благодаря этому модификация LineDriver HTL (HLD) является полностью взаимозаменяемой с LineDriver TTL и Push-Pull.

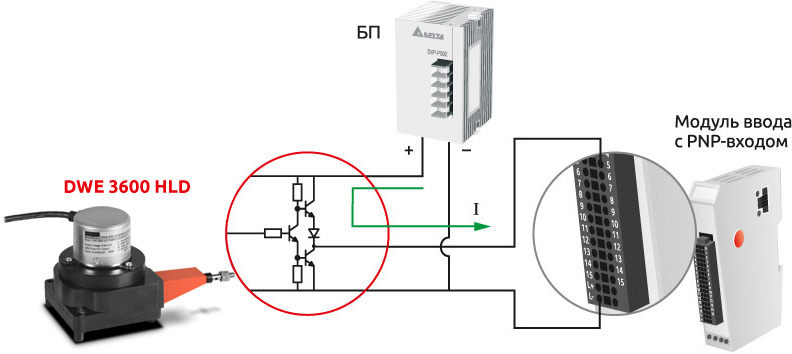
Универсальные выходы LineDriver
Каждый из выходных сигналов (A, А, B, B, Z, Z) энкодеров OPKON DWE (модификации HTL) является универсальным (реализован по схеме Push-Pull) работает с NPN, и PNP-входами. Это дает возможность использовать энкодеры с выходом LineDriver для передачи сигнала по стандартной дифференциальной схеме и по однопроводной схеме (без инвертированных сигналов).
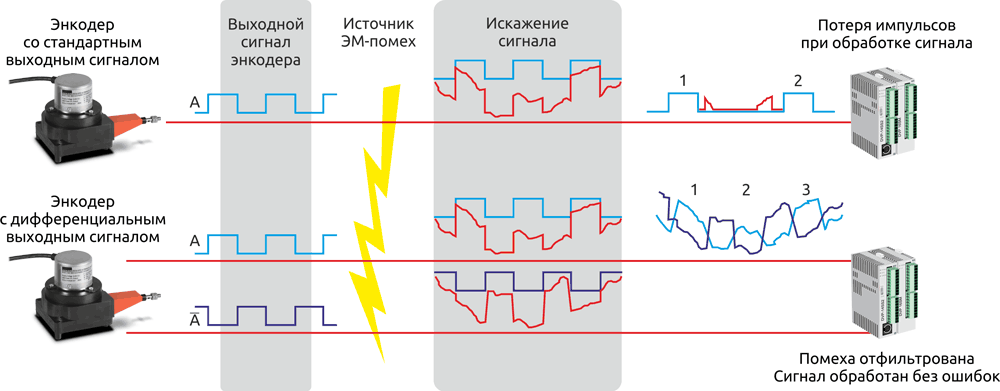
Помехозащищенность дифференциального выходного сигнала
При использовании энкодеров со стандартным выходом (ABZ) возможно возникновение ложных срабатываний. Это может происходить из-за большой длины сигнального кабеля, стороннего оборудования (излучение ЭМ-помех) или при несоблюдение правил монтажа. Для работы в таких условиях рекомендуется использовать энкодеры с дифференциальным выходом (A, A,B, B, Z, Z).
Помехозащищенность дифференциального сигнала выше, т.к. вторичное устройство (счетчик) отслеживает разницу между двумя сигналами (A и A), а не между одиночным сигналом и уровнем питающего напряжения (А и Vобщ.). Таким образом, помехи одинаково влияющие на два проводника (A и A) при дальнейшей обработке сигнала (дифференциальным усилителем вторичного устройства) фильтруются и не вносят ошибок в измерения.
Примеры использования оптического тросового энкодера серии DWE
Список применений:
- Контроль положение кушетки аппарата магнитно-резонансной томографии
- Автоматический ножничный подъемник
- Автоматизация подъема вилочного погрузчика
- Производство мебельного щита
Контроль положение кушетки аппарата магнитно-резонансной томографии
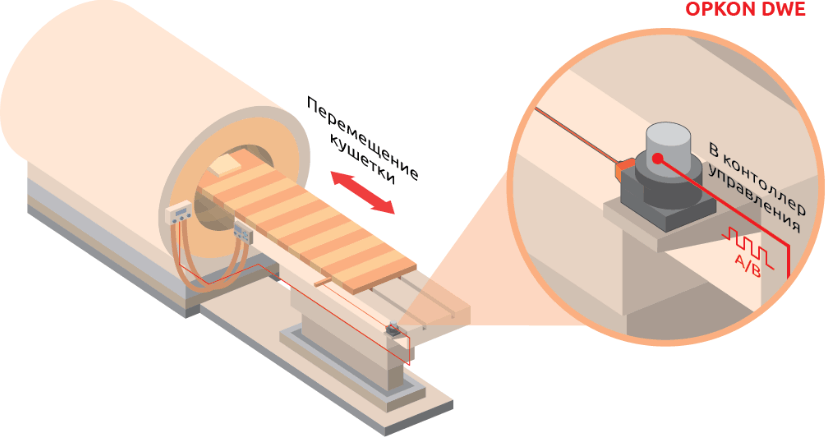
Благодаря тросовой конструкции энкодер OPKON DWE 1500 HLD P2000 Z V3 2M5R SL-TS может применяться в медицинском оборудовании с высоким уровнем ЭМ-помех. В рабочей зоне аппарата МРТ находится только трос (изготовлен из немагнитного материала), а сам энкодер размещается в безопасной зоне. Благодаря вынесению корпуса энкодера в безопасную зону обеспечивается стабильная работа и точное измерение.
Автоматический ножничный подъемник
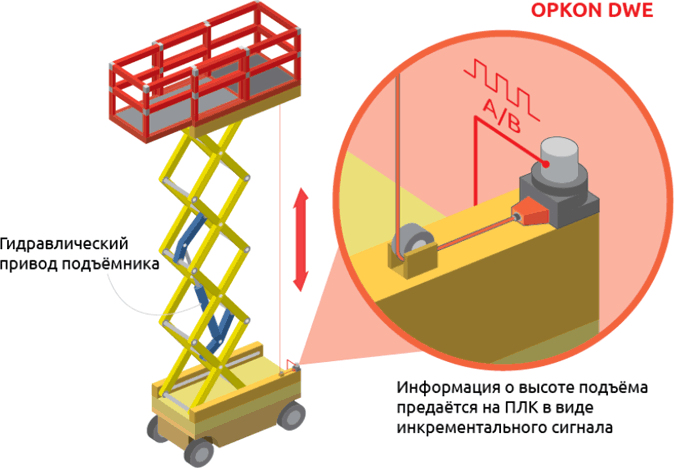
Для контроля высоты на ножничных подъемниках может использовать тросовый энкодер OPKON DWE 3600 HLD P2000 Z V3 2M5R SL-TS. Внедрение датчика положения (обратной связи) позволяет отслеживать высоту подъема. Подъемники, оборудованные системой управления с обратной связью могут в автоматическом режиме осуществлять подъем на заранее заданную высоту.
Автоматизация подъема вилочного погрузчика
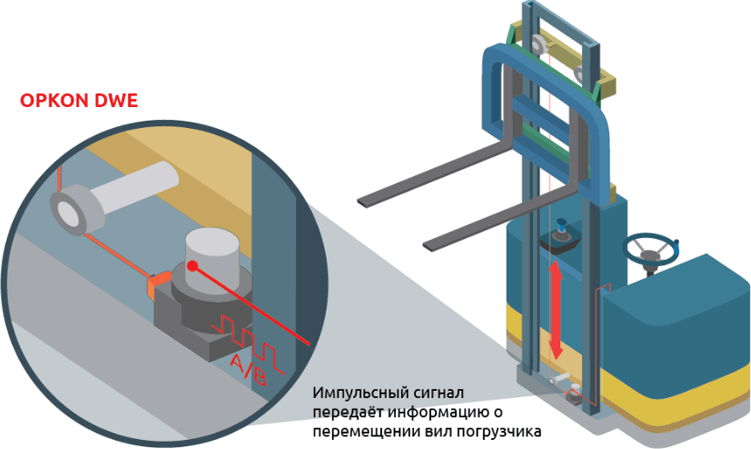
Для облегчения позиционирования захвата на погрузчике может применяться тросовый энкодер OPKON DWE 3600 HLD P2000 Z V3 2M5R SL-TS. Благодаря компактной конструкции датчик может быть установлен внутри подъемного механизма. Сигнал энкодера передается на контроллер управления, который хранит предустановленные значение высоты для каждого яруса стеллажей. Энкодер позволяет измерять высоту до 3,6 метров.
Производство мебельного щита
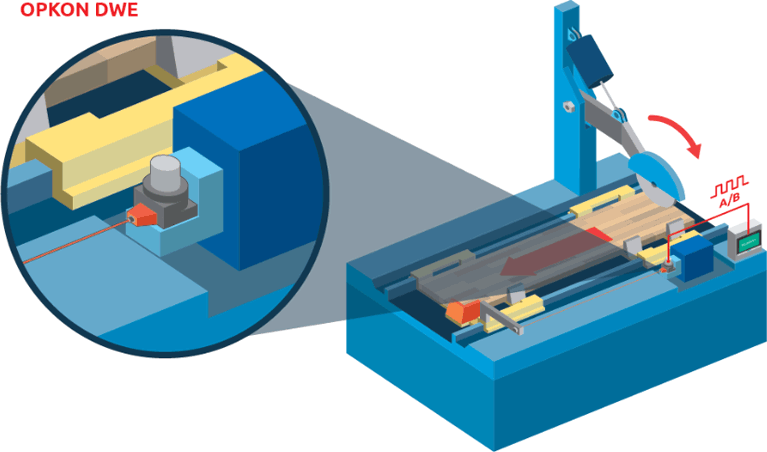
При производстве мебельного щита возможно применение энкодеров OPKON DWE 500 HLD P2000 Z V3 2M5R SL-TS. Для нарезки заготовок заданного размера станок оборудован подвижным упором. Перемещение упора осуществляется помощью привода и отслеживается тросовым энкодером OPKON DWE. Применение энкодера обеспечивает быстрый и точный переход на новый размер заготовок. Для управления торцовочным станком может использоваться операторская панель ELHART ELP-10.
Технические характеристики тросового энкодера OPKON DWE
| Параметр | Значение |
|---|---|
| Тип энкодера | оптический |
| Разрешение | 0,1 или 0,2 или 0,4 мм/имп определяется при заказе |
| Рабочий диапазон | 500, 1000, 1500, 2000, 2500, 3000, 3500, 3600 мм |
| Выходной сигнал | Push-Pull, TTL, HTL |
| Напряжение питания | =5 В, =5…24 В |
| Выходные каналы | A, B, Z |
| Потребляемая мощность(без нагрузки) | 40 мА (при =24 В) |
| Тип подключения | кабель 2,5…10 м |
| Степень защиты | IP54 |
| Рабочая температура | -20…+80 °C |
| Температура хранения | -30…+90 °C |
| Материал корпуса | анодированный алюминий, сталь, пластик ABS |
Габаритные размеры тросового энкодера OPKON DWE
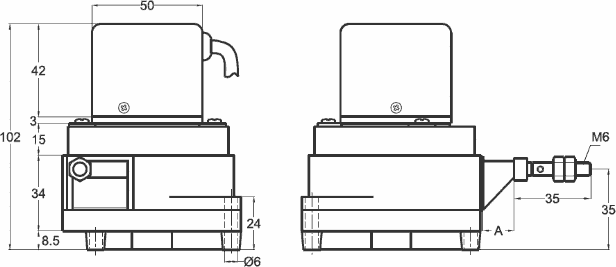
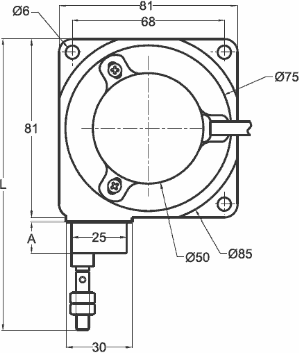
| Рабочий диапазон |
A, мм | L, мм |
|---|---|---|
| До 2500 мм | 14 | 132 |
| 2500…3600 мм | 50 | 168 |
Схемы подключения линейных энкодеров OPKON DWE
Подключение энкодеров c выходным сигналом Push-Pull
| Контакт | Обозначение | Описание |
|---|---|---|
| Коричневый | V+ | Питание, =5 В, =5…24 В |
| Белый | V- | Питание, 0 В |
| Желтый | A | Выходной сигнал, фаза А |
| Зеленый | B | Выходной сигнал, фаза B |
| Серый | Z | Выходной сигнал, фаза Z |
| Экран | GND | Заземление |
Подключение энкодеров PRI c выходным сигналом LineDriver
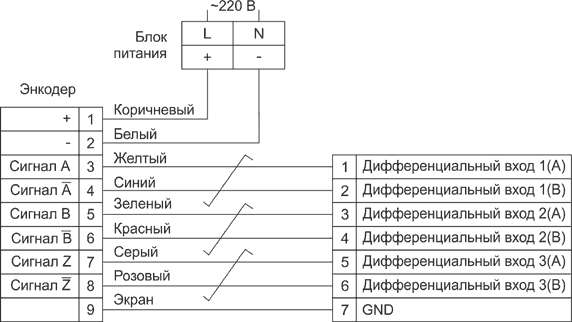
| Контакт | Обозначение | Описание |
|---|---|---|
| Коричневый | V+ | Питание, =5 В, =5…24 В |
| Белый | V- | Питание, 0 В |
| Желтый | A | Выходной сигнал, фаза А |
| Синий | A | Выходной сигнал, фаза A |
| Зеленый | B | Выходной сигнал, фаза B |
| Красный | B | Выходной сигнал, фаза B |
| Серый | Z | Выходной сигнал, фаза Z |
| Розовый | Z | Выходной сигнал, фаза Z |
| Экран | GND | Заземление |
Информация для заказа тросового энкодера OPKON DWE
| DWE | * | |||||||
|---|---|---|---|---|---|---|---|---|
| Рабочий диапазон | ||||||||
| 500, 1000, 1500, 2000, 2500, 3000, 3500, 3600 мм |
500…3600 | |||||||
| Тип выходного сигнала | ||||||||
| Push-Pull | LTP | |||||||
| TTL Linedriver | TTL | |||||||
| HTL Linedriver | HLD | |||||||
| Разрешение | ||||||||
| 0,1 мм/импульс | P2000 | |||||||
| 0,2 мм/импульс | P1000 | |||||||
| 0,4 мм/импульс | P500 | |||||||
| Выходные каналы | ||||||||
| Каналы A и B | B | |||||||
| Каналы A, B и Z | Z | |||||||
| Напряжение питания | ||||||||
| =5 В | V1 | |||||||
| =5…24 В | V3 | |||||||
| Тип подключения | ||||||||
| Кабель, 2,5 метра | 2M5 | |||||||
| Кабель, 5 метров | 5M | |||||||
| Кабель, 8 метров | 8M | |||||||
| Кабель, 10 метров | 10M | |||||||
| Тип ввода кабеля | ||||||||
| Угловой | R | |||||||
Пример: DWE 3600 HLD P2000 Z V3 2M5R SL-TS.