Схема 5: Каскадное управление тремя насосами в режиме с переменным мастером
При возникновении вопросов в подборе оборудования Вы можете обратиться в техническую поддержку компании «МЕГАКИП» по телефону +375-212-64-17-00 или отправить заявку на почту order@megakip.by.
Описание схемы
Схема 5. Каскадное управление тремя насосами в режиме с переменным мастером

Для управления насосами используется преобразователь частоты EMD-PUMP совместно с аналоговым датчиком давления PTE5000C с выходным сигналом 4…20 мА. Мощность электродвигателей насосов может быть от 2,2 до 350 кВт.
EMD-PUMP работает в каскадном режиме с переменным мастером и обеспечивает поддержание давления в условиях изменяющегося расхода за счет изменения количества работающих агрегатов:
- При нехватке производительности одного насоса, в работу включается второй, а затем третий.
- При избыточной производительности, происходит отключение части работающих насосов.
В данном примере используется преобразователь частоты мощностью 5,5 кВт, датчик давления с диапазоном измерения 0…10 бар.
Каскадное управление с переменным мастером
ПЧ регулирует обороты одного насоса. В случае нехватки производительности одного насоса ПЧ переключает подключенный к нему насос на прямое питание от сети и начинает регулировать обороты второго насоса. Если не хватает производительности двух насосов, то в работу включается третий насос. Алгоритм включения третьего насоса аналогичен включению второго — подключенный к ПЧ насос переключается на прямое питание от сети, а к выходу ПЧ подключается следующий.
Схема подключения
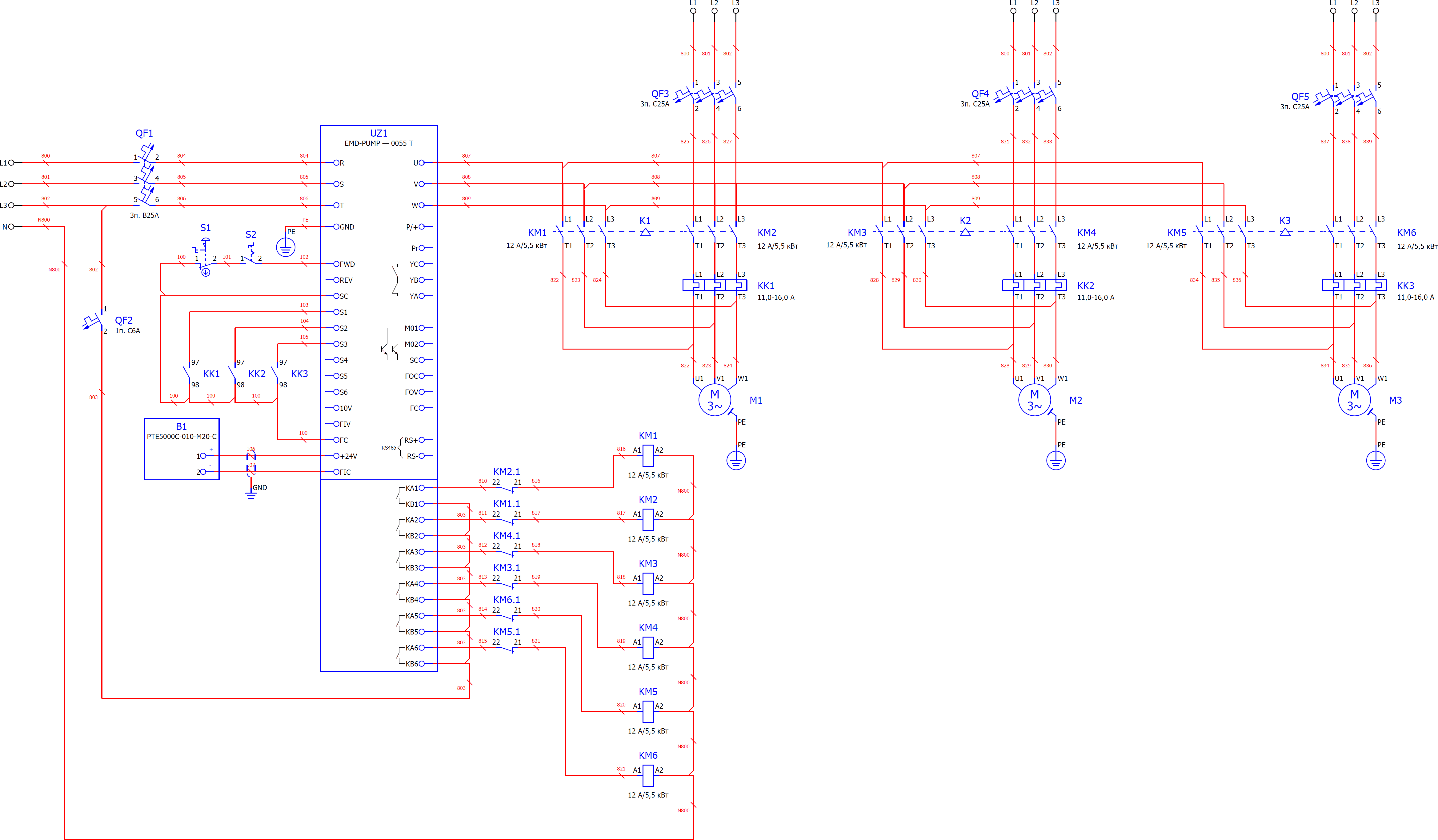
Для использования встроенного блока питания =24 В необходимо объединить «общий вывод для аналоговых сигналов — FC» и «общий вывод для дискретных сигналов — SC» с помощью перемычки, как это показано на Рисунке 1.
Список используемого оборудования
| Условное обозначение на схеме | Артикул | Описание | Кол-во | |
|---|---|---|---|---|
| UZ1 | EMD-PUMP — 0055 T * | Преобразователь частоты ELHART, насосная серия (5,5 кВт, 12,5А, 380В, встроенный ПИД-регулятор, каскадный режим, график уставок, поддержание диф. давления, съемный пульт, RS-485 Modbus RTU), серия EMD-PUMP для насосов и вентиляторов | 1 | |
| B1 | PTE5000C-010-М20-С * | Датчик давления 0…10 бар, точность 0,5%, выход 4…20 мА, М20*1,5 наружная резьба, питание 10…30 V DC, -20 … +100 °С | 1 | |
| KM1…KM2 | ACU-3.012.230 | Контактор стандартный с увел. ресурсом АС3, ном. ток 12 А/5,5 кВт, доп. контакты 1НО+1НЗ, катушка ~230В, размер 1, монтаж на DIN-рейку | 6 | |
| KM1.1, KM2.1 | AC-CB22 | Доп. контакт для контактора (серий ACS, ACU, ACP), 2НО+2НЗ, ном. ток 1,6/0,95А, ~230/400В | 6 | |
| К1…К3 | LSZ0W002 * * | Механическое устройство блокировки для контакторов LSD размера 0-3 | 3 | |
| КК1…КК2 | AC-TR-0130.1 | Тепловое реле, защита от перегрузки, 9-13А, ~400/690В (для контакторов серий ACU/ACS с размером 1) | 3 | |
| S1 | B200EE | Аварийная кнопка с желт. "STOP" "Грибок" d=40мм с фикс. и возвратом поворотом (1НЗ) | 1 | |
| S2 | CP100S20 | Переключатель 0-1 с фикс. 1НО IP65 | 1 | |
| Монтажный комплект для датчика давления | ||||
| — | 00000006782 | Кран трехходовой м/м, М20х1,5 внутр. / G1/2 внутр., рабочее давление - 2,5МПа, макс. - 6,0МПа, макс. температура – 120 °С | 1 | |
| — | №4 БП-КР-40-G1/2 | Бобышка приварная (штуцер приварной под кран для манометра, высота 40мм, G1/2 наружная, d=21мм) | 1 | |
| — | 00000025172 | Прокладка паронитовая G1/2, M20X1,5 | 1 | |
* — модификация определяется при заказе.
Параметры настройки
Настройки для v2.0
| Код параметра |
Параметр | Описание | Значение |
|---|---|---|---|
| F1.17 | Установка заводских параметров | Установить заводские параметры | 8 |
| F0.00 | Параметр, отображаемый на дисплее после подачи питания | Совместное отображение значений уставки (H) и обратной связи (P) ПИД-регулятора | 12 |
| F1.02 | Источник команд управления | Многофункциональные дискретные входы | 1 |
| F1.03 | Блокировка кнопки “STOP” на пульте управления | Кнопка активна | 1 |
| F1.04 | Блокировка вращения назад | Вращение назад запрещено | 0 |
| F1.05 | Максимальная выходная частота | (F1.06)…400,00 Гц, шаг 0,01 Гц | 50.00 * |
| F1.06 | Минимальная выходная частота | 0,00…(F1.05) Гц, шаг 0,01 Гц | 25.00 * |
| F1.07 | Время ускорения | 0…6000,0 сек, шаг 0,1 сек | * |
| F1.08 | Время замедления | 0…6000,0 сек, шаг 0,1 сек | * |
| F2.01 | Способ остановки двигателя | Остановка на выбеге | 1 |
| F2.09 | Номинальное напряжение электродвигателя | 0…500,0 В | 380.0 ** |
| F2.10 | Номинальный ток двигателя | 0…номинальный ток ПЧ, шаг 0,1 А | * |
| F2.15 | Номинальная частота напряжения питания электродвигателя | 0…400,00 Гц | 50 * |
| F3.03 | Минимальный ток на входе FIC | 0,00…(F3.04) мА, шаг 0,1 мА | 4.0 |
| F3.04 | Максимальный ток на входе FIC | (F3.03)0…20,0 мА, шаг 0,1 мА | 20.0 |
| F3.15 | Многофункциональный дискретный вход FWD | Вращение в прямом направлении | 6 |
| F3.17 | Многофункциональный дискретный вход S1 | Блокировка работы двигателя 1 | 51 |
| F3.18 | Многофункциональный дискретный вход S2 | Блокировка работы двигателя 2 | 52 |
| F3.19 | Многофункциональный дискретный вход S3 | Блокировка работы двигателя 3 | 53 |
| F4.09 | Ограничение тока при ускорении | 0…200% от значения параметра F2.10, шаг 1% | 110 * |
| F4.16 | Автостарт после подачи питания | 0: Запрещен 1: Разрешен |
* |
| F4.20 | Количество автостартов после аварии | 0…5 | * |
| F4.21 | Задержка перед автостартом после аварии | 0…25,0 сек | * |
| F4.22 | Реакция на превышение тока | Активна всегда: при превышении тока ПЧ отключается | 3 |
| F4.23 | Уровень превышения тока | 0…200% от номинального тока двигателя (F2.10), шаг 1% | 120 |
| F4.24 | Время обнаружения превышения тока | 0…9,0 (значение умножается на 200 мсек) | 9.0 |
| F6.00 | Включение ПИД-регулятора | Включен | 1 |
| F6.02 | Источник задания уставки ПИД-регулятора | Энкодер на пульте управления ПЧ | 3 |
| F6.03 | Источник обратной связи ПИД-регулятора | Аналоговый сигнал на входе FIC | 1 |
| F6.13 | Уровень выхода из спящего режима | 0…200,0%, шаг 0,1% | 90.0 |
| F6.14 | Диапазон задания уставки ПИД-регулятора | 0…99,99, шаг 1 | 10.00 * |
| F6.15 | Кол-во разрядов после точки при отображении на дисплее | 0…4, шаг 1 | 4 * |
| F6.16 | Кол-во разрядов после точки при отображении на дисплее | 0…4 | 2 * |
| F6.20 | Релейный выход КА1, КВ1 | Двигатель 1 работает от ПЧ | 2 |
| F6.21 | Релейный выход КА2, КВ2 | Двигатель 1 работает от сети | 1 |
| F6.22 | Релейный выход КА3, КВ3 | Двигатель 2 работает от ПЧ | 4 |
| F6.23 | Релейный выход КА4, КВ4 | Двигатель 2 работает от сети | 3 |
| F6.24 | Релейный выход КА5, КВ5 | Двигатель 3 работает от ПЧ | 6 |
| F6.25 | Релейный выход КА6, КВ6 | Двигатель 3 работает от сети | 5 |
| F6.26 | Релейный выход КА7, КВ7 | Не используется | 0 |
| F6.27 | Релейный выход КА8, КВ8 | Не используется | 0 |
| F6.28 | Установка времени, секунды | 0…60 с | * |
| F6.29 | Установка времени, минуты | 0…60 мин | * |
| F6.30 | Установка времени, часы | 0…24 час | * |
| F6.31 | Установка времени, дни | 0…31 день | * |
| F6.32 | Установка времени, месяцы | 0…12 мес | * |
| F6.33 | Установка времени, год | 0…99 год | * |
| F6.34 | Режим работы двигателя 1 | Работа от преобразователя частоты | 1 |
| F6.35 | Режим работы двигателя 2 | Работа от преобразователя частоты | 1 |
| F6.36 | Режим работы двигателя 3 | Работа от преобразователя частоты | 1 |
| F6.37 | Режим работы двигателя 4 | Не используется | 0 |
| F6.38 | Режим работы двигателя 5 | Не используется | 0 |
| F6.39 | Режим работы двигателя 6 | Не используется | 0 |
| F6.40 | Режим работы двигателя 7 | Не используется | 0 |
| F6.41 | Допустимое отклонение сигнала обратной связи от уставки для включения следующего двигателя в каскадном режиме | 0…25% | 2.0 * |
| F6.42 | Частота включения следующего двигателя в каскадном режиме | 0…(F1.05) Гц | 48.00 * |
| F6.43 | Время задержки включения следующего двигателя в каскадном режиме | 0…3600,0 сек, шаг 0,1 сек | 20.0 * |
| F6.45 | Допустимое отклонение сигнала обратной связи от уставки для отключения двигателя в каскадном режиме | 0…25% | 5.0 * |
| F6.46 | Частота отключения двигателя в каскадном режиме | 0…(F1.05) Гц | 26 * |
| F6.47 | Время задержки отключения следующего двигателя в каскадном режиме | 0…3600,0 сек, шаг 0,1 сек | 20.0 * |
| F6.49 | Задержка перед запуском двигателя после подключения к ПЧ | 0…10,0 сек, шаг 0,1 сек | 0.0 |
| F6.50 | Задержка переключения двигателя на питание от сети после отключения от ПЧ | 0…10,0 сек | 0.1 * |
| F6.51 | Время чередования двигателей | 0…65535 мин, шаг 1 мин | 1440 * |
| F6.68 | Возможность ухода в спящий режим | Активна | 255 |
| F6.69 | Допустимое отклонение сигнала обратной связи от уставки для перехода в спящий режим | 0…25%, шаг 0,1% | 5.0 * |
| F6.77 | Отслеживание обрыва датчика ОС ПИД-регулятора | Остановка электродвигателя с ручным сбросом аварии | 2 |
| F6.78 | Нижний уровень сигнала ОС | 0…10,00 В, шаг 0,01 В (4 мА соответствуют 1,0 В, 20 мА соответствует 5,0 В) | 1.0 |
| F6.79 | Время задержки аварии по обрыву сигнала на аналоговом входе FIC | 0…25,0 сек , шаг 0,1 сек | 25.0 |
| F6.93 | Режим каскадного управления насосами | Включен | 1 |
Настройки для v1.x
| Код параметра |
Параметр | Описание | Значение |
|---|---|---|---|
| F1.17 | Установка заводских параметров | Установить заводские параметры | 8 |
| F1.02 | Источник команд управления | Многофункциональные дискретные входы | 1 |
| F1.04 | Блокировка вращения назад | Вращение назад запрещено | 0 |
| F1.05 | Максимальная выходная частота | (F1.06)…400,00 Гц, шаг 0,01 Гц | 50.00 * |
| F1.06 | Минимальная выходная частота | 0,00…(F1.05) Гц, шаг 0,01 Гц | 25.00 * |
| F1.07 | Время ускорения | 0…6000,0 сек, шаг 0,1 сек | 15.0 * |
| F1.08 | Время замедления | 0…6000,0 сек, шаг 0,1 сек | 15.0 * |
| F2.01 | Способ остановки двигателя | 0: Остановка с замедлением 1: Остановка на выбеге |
* |
| F2.10 | Номинальный ток двигателя | 0…номинальный ток ПЧ, шаг 0,1 А | * |
| F3.15 | Многофункциональный дискретный вход FWD | Вращение в прямом направлении | 6 |
| F3.17 | Многофункциональный дискретный вход S1 | Блокировка работы насоса 1 | 27 |
| F3.18 | Многофункциональный дискретный вход S2 | Блокировка работы насоса 2 | 28 |
| F3.19 | Многофункциональный дискретный вход S3 | Блокировка работы насоса 3 | 29 |
| F4.09 | Ограничение тока при ускорении | 0…200 % от номинального тока двигателя (F2.10), шаг 1 % | 110 * |
| F4.10 | Ограничение тока в установившемся режиме | 0…200 % от номинального тока двигателя (F2.10), шаг 1 % | 110 * |
| F4.16 | Автостарт после подачи питания | 0: Запрещен 1: Разрешен |
* |
| F4.17 | Задержка автостарта после подачи питания | 0…10,0 сек, шаг 0,1 сек | * |
| F4.22 | Защита от перегрузки электродвигателя | Активна всегда: при обнаружении перегрузки, электродвигатель отключается | 3 |
| F4.23 | Уровень превышения тока для обнаружения перегрузки электродвигателя | 0…200 % от номинального тока двигателя (F2.10), шаг 1 % | 120 |
| F4.24 | Время до обнаружения перегрузки электродвигателя | 0…9,0 (значение умножается на 200 мсек) ПЧ | 9.0 |
| F6.00 | Включение ПИД-регулятора | Включен | 1 |
| F6.02 | Источник задания уставки ПИД-регулятора | Потенциометр на пульте управления ПЧ | 3 |
| F6.03 | Источник обратной связи ПИД-регулятора | Аналоговый сигнал на входе FIC | 1 |
| F6.20 | Релейный выход КА1, КВ1 | Электродвигатель 1 работает от ПЧ | 2 |
| F6.21 | Релейный выход КА2, КВ2 | Электродвигатель 1 работает от сети | 1 |
| F6.22 | Релейный выход КА3, КВ3 | Электродвигатель 2 работает от ПЧ | 4 |
| F6.23 | Релейный выход КА4, КВ4 | Электродвигатель 2 работает от сети | 3 |
| F6.24 | Релейный выход КА5, КВ5 | Электродвигатель 3 работает от ПЧ | 6 |
| F6.25 | Релейный выход КА6, КВ6 | Электродвигатель 3 работает от сети | 5 |
| F6.34 | Режим работы электродвигателя 1 | Работа от преобразователя частоты | 1 |
| F6.35 | Режим работы электродвигателя 2 | Работа от преобразователя частоты | 1 |
| F6.36 | Режим работы электродвигателя 3 | Работа от преобразователя частоты | 1 |
| F6.37 | Режим работы электродвигателя 4 | Не используется | 0 |
| F6.38 | Режим работы электродвигателя 5 | Не используется | 0 |
| F6.39 | Режим работы электродвигателя 6 | Не используется | 0 |
| F6.40 | Режим работы электродвигателя 7 | Не используется | 0 |
| F6.41 | Допустимое отклонение сигнала обратной связи от уставки для включения следующего электродвигателя в каскадном режиме | 0…25 %, шаг 0,1 % | 2.0 * |
| F6.42 | Частота включения следующего электродвигателя в каскадном режиме | 0…(F1.05) Гц, шаг 0,01 Гц | 48.00 * |
| F6.43 | Время задержки включения следующего электродвигателя в каскадном режиме | 0…3600,0 сек, шаг 0,1 сек | 20.0 * |
| F6.45 | Допустимое отклонение сигнала обратной связи от уставки для отключения электродвигателя в каскадном режиме | 0…25 %, шаг 0,1 % | 5.0 * |
| F6.46 | Частота отключения электродвигателя в каскадном режиме | 0…(F1.05) Гц, шаг 0,01 Гц | 26.00 * |
| F6.47 | Время задержки отключения электродвигателя в каскадном режиме | 0…3600,0 сек, шаг 0,1 сек | 20.0 * |
| F6.49 | Задержка перед запуском электродвигателя после подключения к ПЧ | 0…10,0 сек, шаг 0,1 сек | 1.0 * |
| F6.50 | Задержка переключения электродвигателя на питание от сети после отключения от ПЧ | 0…10,0 сек, шаг 0,1 сек | 1.0 * |
| F6.68 | Возможность ухода в спящий режим | Активна | 255 |
| F6.69 | Допустимое отклонение сигнала обратной связи от уставки для перехода в спящий режим | 0…25,0 %, шаг 0,1 % | 5.0 |
| F6.70 | Время задержки перехода в спящий режим | 0…3600,0 сек, шаг 0,1 сек | 60.0 |
| F6.71 | Частота перехода в спящий режим | 0…(F1.05) Гц, шаг 0,01 Гц | 25.00 |
| F6.73 | Допустимое отклонение сигнала обратной связи от уставки для выхода из спящего режима | 0…25,0 %, шаг 0,1 % | 3.0 |
| F6.74 | Время задержки выхода из спящего режима | 0…3600,0 сек, шаг 0,1 сек | 3.0 |
| F6.76 | Отслеживание обрыва сигнала на аналоговом входе FIC | Остановка электродвигателя с ручным сбросом аварии | 2 |
| F6.77 | Нижний уровень сигнала на аналоговом входе FIC | 0…5,0 мА, шаг 0,1 мА | 3.0 |
| F6.78 | Время задержки аварии по обрыву сигнала на аналоговом входе FIC | 0…25,0 сек , шаг 0,1 сек | 25.0 |
* — значение параметра задается в соответствии с условиями/требованиями технологического процесса и допустимым режимом работы оборудования.
При использовании функции «Отслеживание обрыва сигнала на аналоговом входе FIC» нужно обратить внимание на то, что при обнаружении аварии, ПЧ остановит подключенный к нему электродвигатель, но в работе останутся электродвигатели подключенные к сетевому напряжению. Если данный режим работы не удовлетворяет условиям технологического процесса, то необходимо завести сигнал аварии с дискретного выхода ПЧ (например, F3.25 = 16) на дискретные входы настроенные на блокировку работы насосов.
Полезные ссылки: